
ラックアンドピニオン直動システムの選定方法
製品選定サイトもご活用ください
ラックアンドピニオン直動システムのシステム選定方法について、
必要搬送力の算出から、ラック、ピニオン、減速機の選定の方法を解説しています
ラックアンドピニオン直動システムの
システム選定お手伝いします
必要な仕様をお伝えいただけましたら、ラックアンドピニオン直動システムのシステム選定のサポートを行います
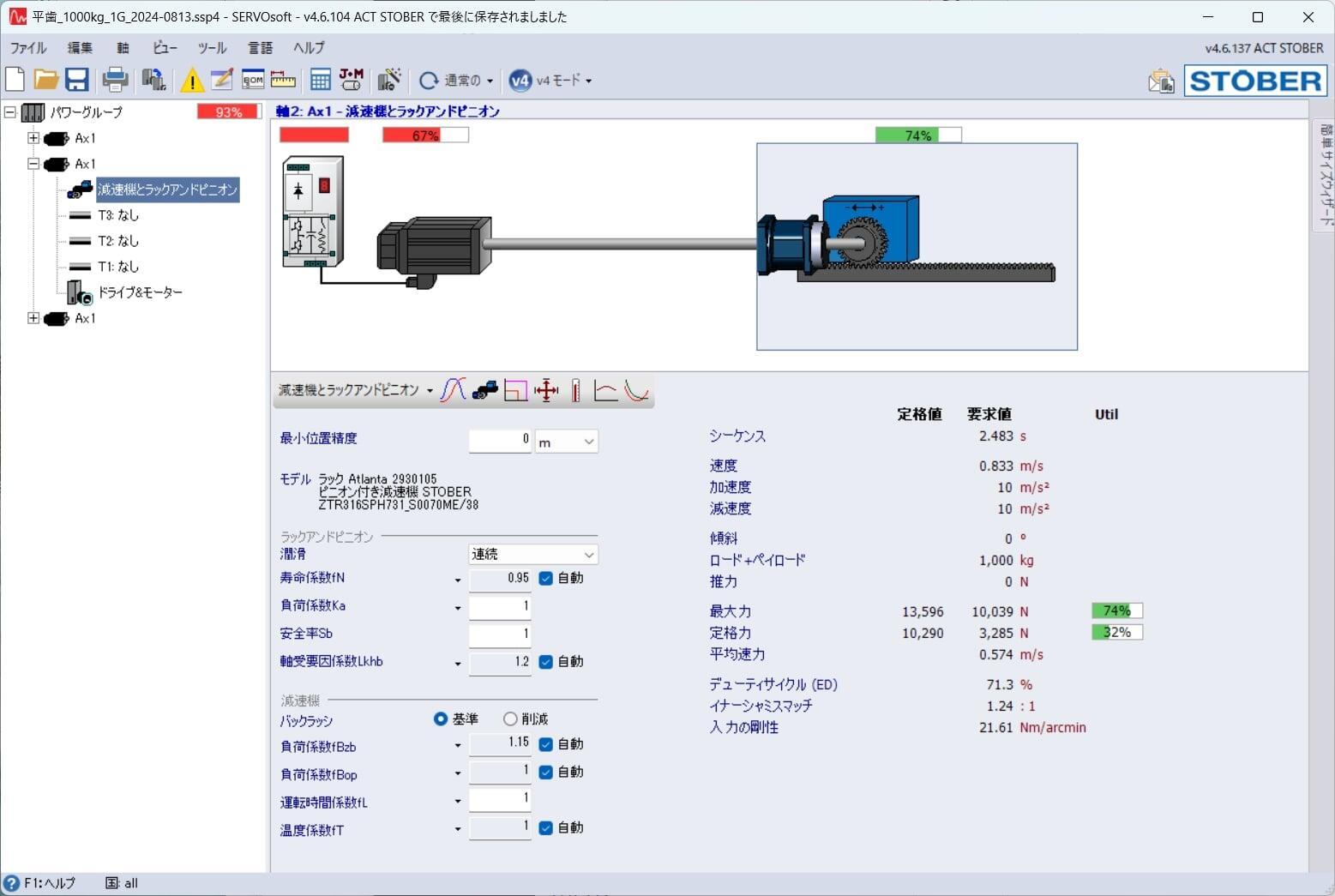
専用ソフトにより、搬送力、トルクの余裕度、サーボモータの余裕度が算出されるため、より詳細な設計が可能です
お気軽にお問い合わせください

システム選定事例
ラックアンドピニオン直動システムのシステム選定例を
ブログに掲載しております。
① ラックアンドピニオン直動システムの要求仕様の確認
ラックアンドピニオン直動システムのシステム選定に必要とされる以下の諸元の算出・確認を行います
- 搬送質量:ラックアンドピニオン直動システムで搬送するワーク、台座、ステージ等の総重量を算出します
- 摩擦係数:搬送システムの摩擦係数、リニアガイド、スライドレール等、使用する部材の仕様を確認します
- 反力等の外力の確認:ラックアンドピニオン直動システムに加わる反力(切削抵抗力等)や補助力(カウンターバランス等)を算出、確認します。
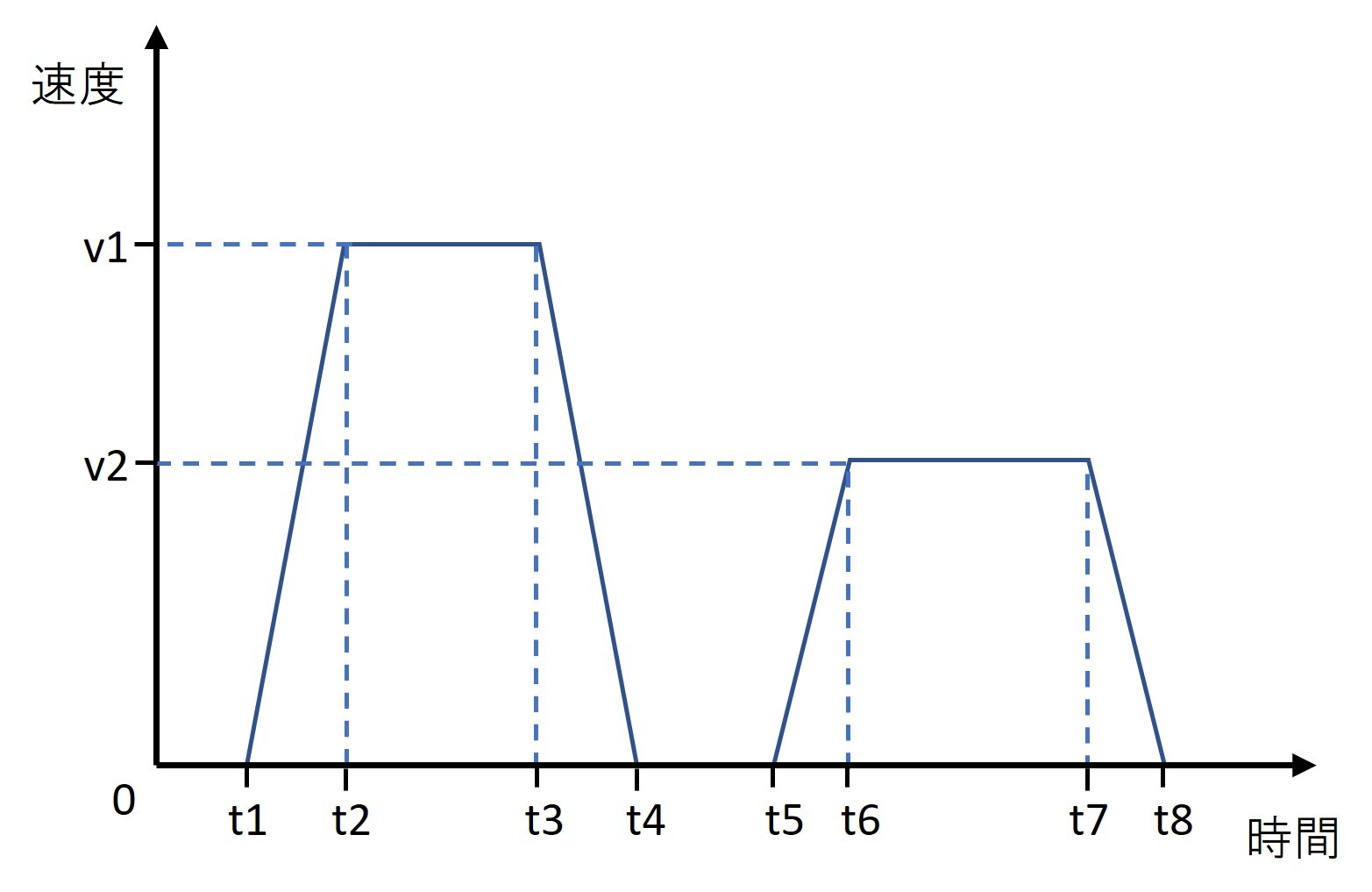
- 運転パターン:以下のように搬送システムでのモーション、加速時間、搬送速度、停止時間を算出、確認します
② 最大必要搬送力、平均必要搬送力、加速度の算出
ラックアンドピニオン直動システムに必要な必要最大搬送力、必要平均搬送力、加速度の算出・確認を行います
ここではラックが固定され、ピニオン付き減速機が移動する場合を解説します
ラックアンドピニオン直動システムの加速度の算出
<必要諸元>
運転パターン:搬送速度と加速時間
上の図の運転パターンの場合、t1-t2間、およびのt5-t6間の加速度は以下になります

ラックアンドピニオン直動システムの必要最大搬送力
ラックアンドピニオン直動システムに必要な最大必要搬送力、平均必要搬送力の算出・確認を行います
必要な搬送力は以下のように算出します

上式で算出した搬送力で、最大となる値が必要最大搬送力となります。この際にt3-t4間の必要搬送力はマイナスになりますが、必要最大搬送力は絶対値での取り扱いとなります
※反力や補助力がある場合は適宜、算出した搬送力に加算・減算を行います
ラックアンドピニオン直動システムの必要平均搬送力
ラックアンドピニオン直動システムに必要な平均搬送力の算出を以下のように行います
③ ピニオン付き減速機の選定
ラックアンドピニオン直動システムの駆動力となるピニオン付きの減速機を選定します
- 必要最大搬送力 < ピニオン付き減速機の許容最大搬送力 となること
- 必要最大搬送量 < ピニオン付き減速機の定格搬送力 となること
- 最高搬送速度 < ピニオン付き減速機の最高搬送速度 となること
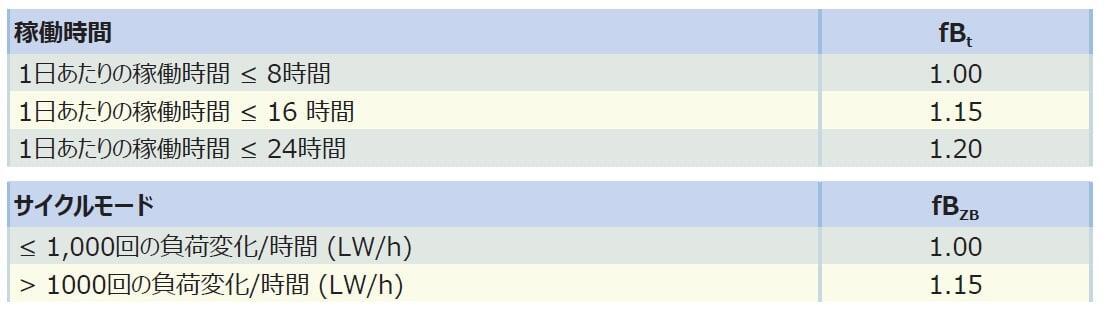
ピニオン付き減速機の選定においては、稼働時間とサイクルモードに応じた余裕度を設定してください
以下の製品選定サイトを用いると、1と3を基にピニオン付き減速機を素早く選定可能です
④ ピニオン付き減速機の平均入力回転数の確認
平均搬送速度から減速機の入力側の回転数を算出し、定格入力回転数を超えていないかと確認を行います
それぞれの値はカタログに記載しておりますので、ご確認ください
⑤ ラックとピニオンの許容値の確認
必要最大搬送力がラックとピニオンの搬送力の限界を超えていないかと確認を行います
それぞれの値はカタログに記載しておりますので、ご確認ください
⑥ ラックの固定力の確認
ラックがスライドしない固定力の確認を行います
必要最大搬送力 < ラックの固定力 となっているかの確認を行ってください
ラックの固定力はボルトの数、ノックピンの使用の有無で変わります
⑦ その他事項
ここまででピニオン付き減速機の選定、ラックのモジュール等が決まりましたが、以下の事項もご確認ください
<サーボモータとの接合部の寸法>
図面、CADデータ等で、サーボモータの出力シャフト径、シャフト長さ、インロー等の寸法と、減速機の入力側の寸法を確認します
※ストーバーは多種多様なモータアダプタプレートを用意しております
<サーボモータとのイナーシャ比の確認>
サーボモータメーカ及び型番、機械装置の特性・仕様により必要値は異なります
<許容出力トルクとサーボモータの出力トルクの関係の確認>
サーボモータの出力トルクx減速比の算出値が減速機の出力トルクを上回る場合は、サーボモータのトルク制限が必要
ラックアンドピニオン直動システムの
システム選定お手伝いします
必要な仕様をお伝えいただけましたら、ラックアンドピニオン直動システムのシステム選定のサポートを行います
専用ソフトにより、搬送力、トルクの余裕度、サーボモータの余裕度が算出されるため、より詳細な設計が可能です
お気軽にお問い合わせください
