
ロボット走行軸のシステム選定例
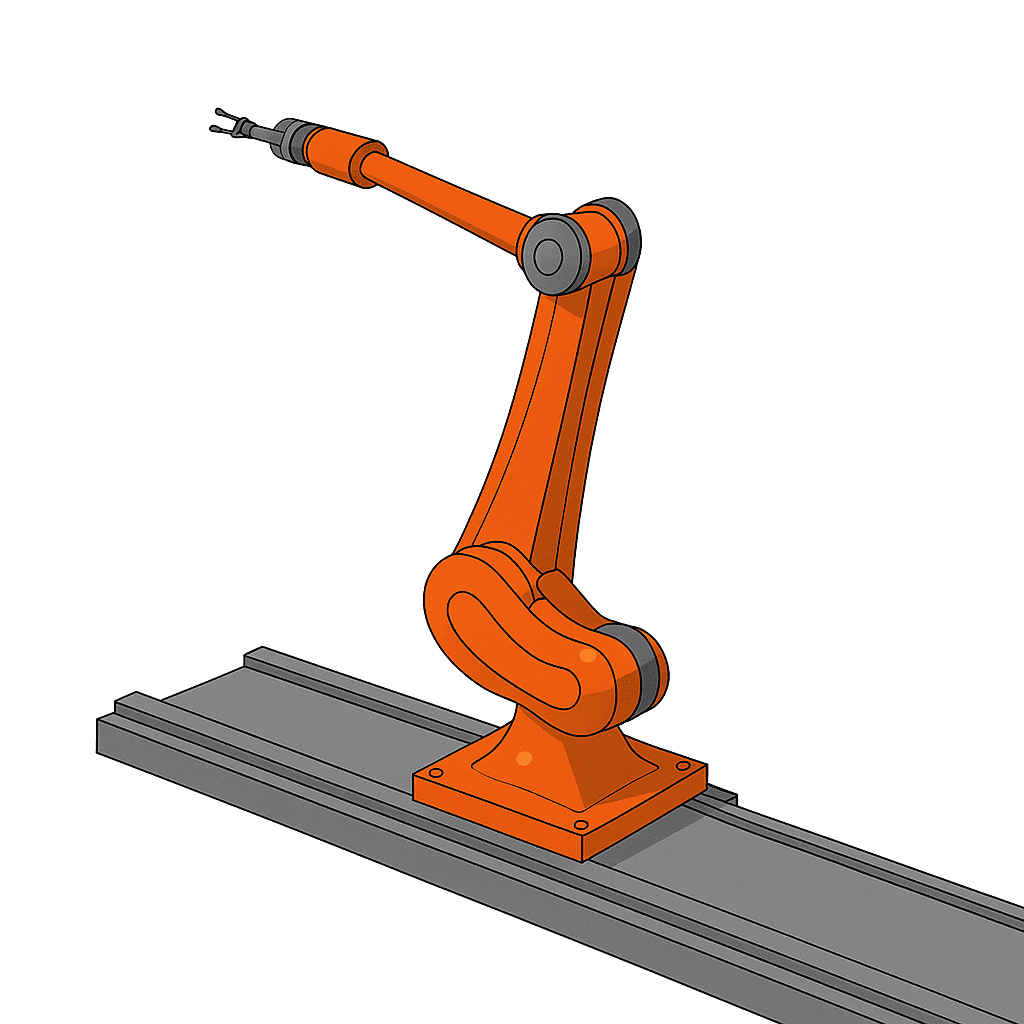
近年、産業用ロボットの可動範囲を拡張するための「ロボット走行軸(トラバースユニット)」の需要が高まっています。しかし、長距離の移動を正確かつ安定して行うためには、減速機・サーボモータ・ラックアンドピニオン・リニアガイドなど多くの要素が高精度に統合される必要があります。
ラックアンドピニオン直動システムのシステム選定には、搬送質量、搬送速度、加速度が重要な要素になりますが、これ以外にも、リニアガイドや台車などの走行部の走行抵抗、摩擦抵抗や、サーボモータと減速機とのイナーシャ比の検討など、様々な要素があります。
システム要求仕様
以下の3パターンを検討します。
選定例① 搬送質量:500kg、搬送速度:60m/min、加速度:5m/s2(約0.5G)
選定例② 搬送質量:800kg、搬送速度:60m/min、加速度:5m/s2(約0.5G)
選定例③ 搬送質量:2,000kg、搬送速度:60m/min、加速度:5m/s2(約0.5G)
今回の選定の狙い
今回のシステム選定では、以下をターゲットとしています
1.小径ピニオンによる高精度化
ピニオン径を出来る限り小さくすることで、ラック上でのバックラッシ量が減り、位置決め精度が高精度になります
2.小型のラックアンドピニオン直動システム
極力小さくコンパクトにまとめることで、設置スペースの柔軟性を高めます
システム選定結果
選定例① 搬送質量:500kg、搬送速度:60m/min、加速度:5m/s2(約0.5G)

必要となる搬送力は3,000N弱となります。
ラック、ピニオンのモジュールは2、ピニオンの歯数は12です。
これによりラック上でのバックラッシであるリニアバックラッシを非常に小さくすることが可能となり、11μmになります
減速機をオプションの低バックラッシタイプに変更すると、リニアバックラッシは11→4μmとさらに小さくなります。
サーボモータは定格出力1kWとなります。
この場合のトルクの余裕度は32%です。
選定例② 搬送質量:800kg、搬送速度:60m/min、加速度:5m/s2(約0.5G)
必要となる搬送力は4,500N弱となります。
ラック、ピニオンのモジュールは2、ピニオンの歯数は16です。
ラック上でのバックラッシであるリニアバックラッシは非常に小さく、15μmになります。
減速機をオプションの低バックラッシタイプに変更すると、リニアバックラッシは15→5μmとさらに小さくなります。
サーボモータは定格出力2kWとなります。
この場合のトルクの余裕度は37%です。
選定例③ 搬送質量2,000kg、搬送速度:60m/min、加速度:5m/s2(約0.5G)

必要となる搬送力は11,000N弱となります。
ラック、ピニオンのモジュールは3、ピニオンの歯数は19です。
ラック上でのバックラッシであるリニアバックラッシは非常に小さく、26μmになります。
減速機をオプションの低バックラッシタイプに変更すると、リニアバックラッシは26→9μmとさらに小さくなります。
サーボモータは定格出力5.5kWとなります。
この場合のトルクの余裕度は37%です。
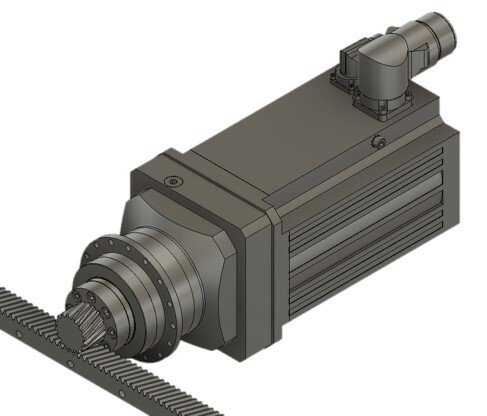
今回システム選定した3つのパターンについて、搬送力などの詳細データ、ピニオン付き減速機とサーボモータの大きさなどは、以下のボタンをクリックして入手をお願いいたします。
ラックアンドピニオン直動システムの選定のご依頼は以下をクリックしてください
